单目测距算法报告
算法流程:
框选识别目标
需要通过图像处理筛选出合适的选框,并传出四点数据。
输入实际坐标
在实际物体上测量物体的长宽。
使用函数解算
使用合适的 OpenCV 算法解算。
相关参数:
- 输入的四点坐标
- 相机的畸变矩阵和平移矩阵
- 识别物体的3D坐标
- solvePNP 的解算方式
目标方向:
- 保证标准角度(即按比赛规则放置的装甲板)下的准确性
- 在比较远的位置(比赛场地半场 8.5m 左右)能够测��出距离
具体实施:
选择标定方法
- ROS 系统中封装的 calibration 功能包
确定优化方向
- 优化输入的长宽数据,核对 2D 点和 3D 点是否对应
- 优化输入灯条矩形的角点,获得更准确的角点数据
- 比较 OpenCV 中不同结算方法的测距结果,选出更加稳定适宜的
- 在绕Pitch轴旋转角度至(±30°),思考如何减少旋转带来的影响
分析误差来源
- 传入的 2D 点和 3D 点顺序不匹配
- 目标检测不稳定,导致测距结果发生变化
- 由于旋转等问题导致 2D 点数据变化
结果呈现:
| IPPE 算法解算效果图 | EPNP 算法解算效果图 | 测试条件 |
|---|---|---|
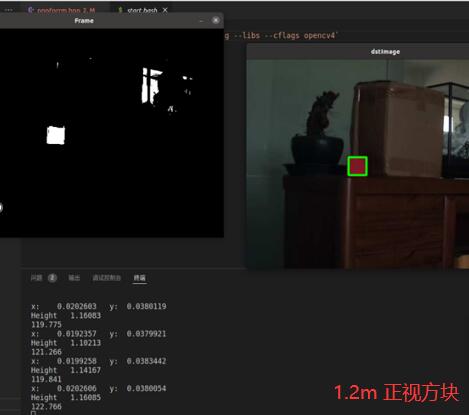 | 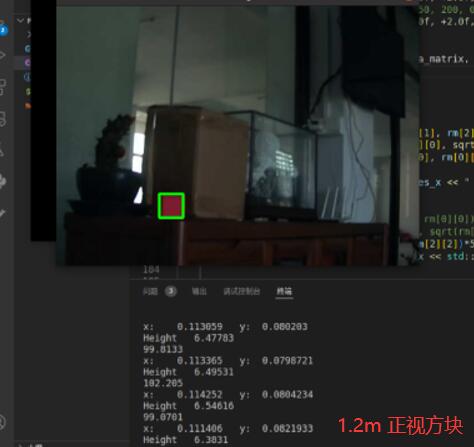 | 1.2m 下正视方块 |
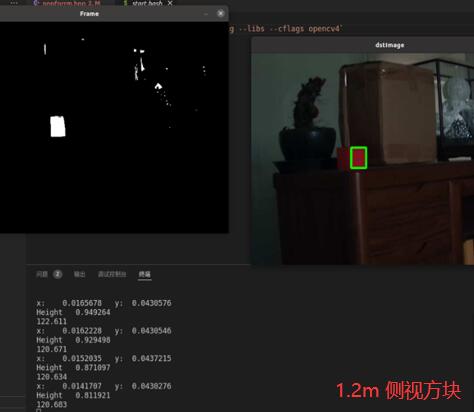 |  | 1.2m 下侧视方块 |
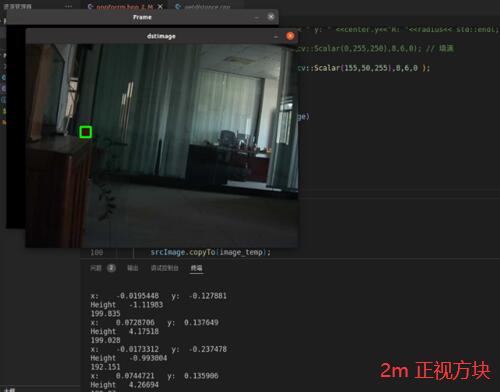 |  | 2m 下正视方块 |
 |  | 2m 下侧视方块 |
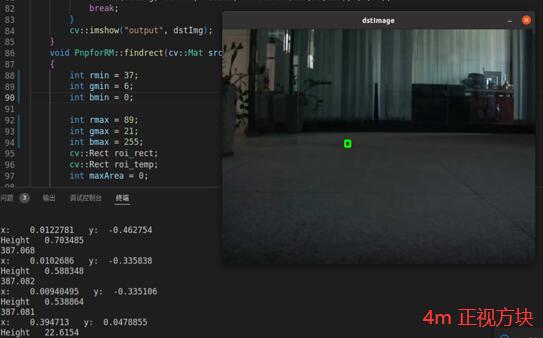 | 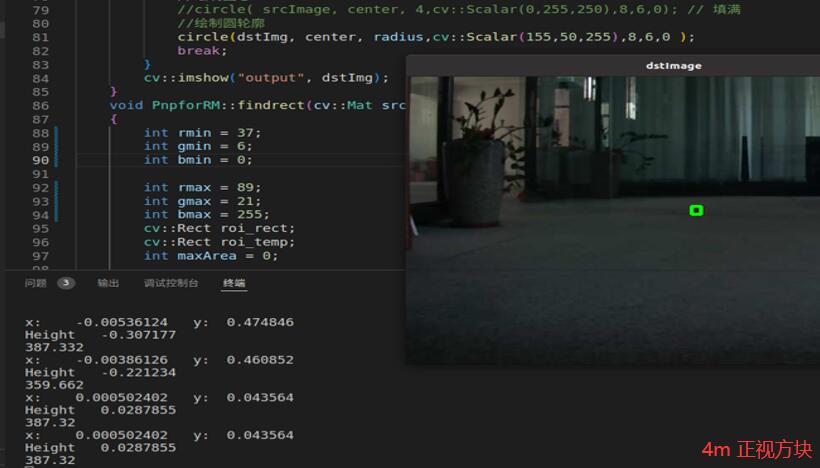 | 4m 下正视方块 |
这份报告的结论由 上车实测 和 算法测试两部分构成,但由于上车实测图片缺失,此处仅附上结论
IPPE在实际上车调试中出现了不稳定的情况,且在输入实际坐标正确时误差很大。
因此不论远近所以还是采用 EPNP算法
| EPNP 算法在��旋转步兵后的识别效果图 | 测试环境 | 结论 |
|---|---|---|
 | 绕 Pitch 轴 +30° 距离 2m | 误差变化不明显 < 0.05m |
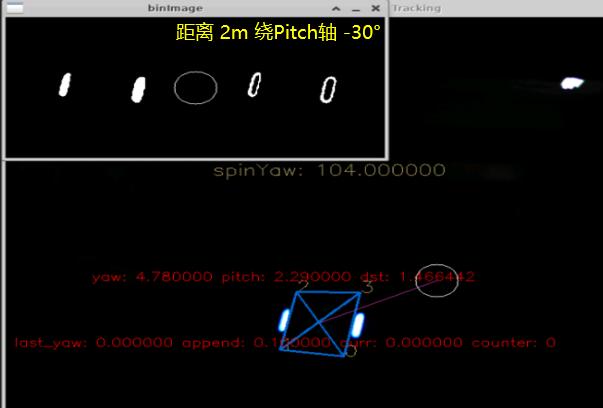 | 绕 Pitch 轴 -30° 距离 2m | 误差变化明显 < 0.2m |
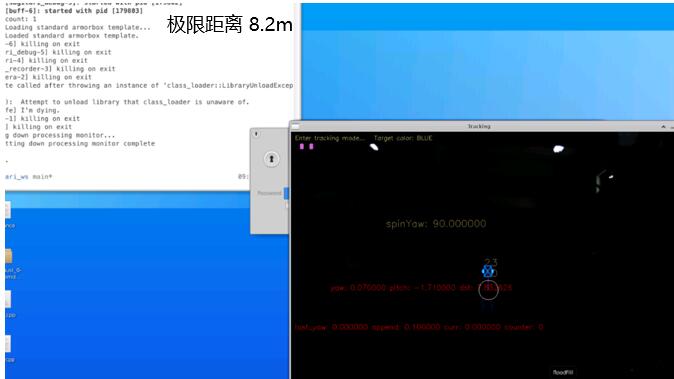 | 绕 Pitch 轴 0° 半场距离 8.2m | 测距不稳定,误差控制在0.4m内 |
- 3~6m下测距误差 < 0.1m
- 大于6m:可以测出误差 < 0.3m 但不稳定
- 极限距离820cm下测距不稳定,误差控制在0.4m内
此处缺失一部分上车测试的图片,会在后期重测数据修改
测试细节:
- 验证过程中可以输出
tvec的 x 和 y 信息辅助验证结果 - 框选的特征点可以继续滤波优化