URDF模型制作
- 首先安装好需要的环境和软件:SolidWorks2021及以上版本、ROS。
SolidWorks的配置
- 插件的安装
首先下载URDF导出插件,下载完成后打开后程序后直接点击 install 即可。
如果不是使用 21 及以上 SolidWorks 版本 也可以在这里的官方地址上下载对应版本的插件。
- 插件的设置
打开 SolidWork 点击 工具(T)->插件(D) ,打开 SolidWorks的插件管理器
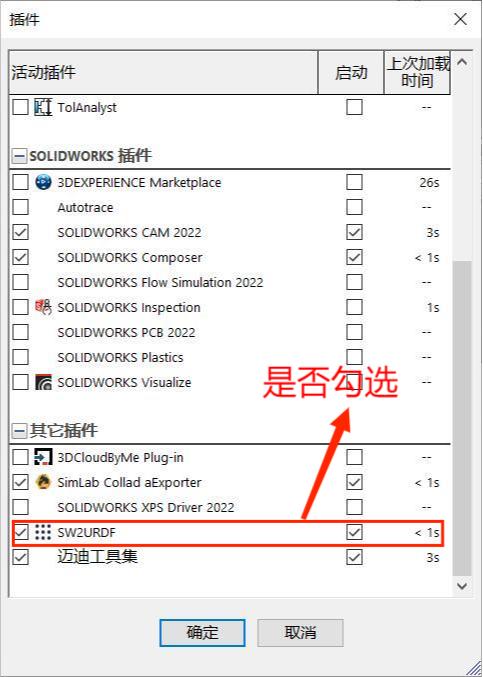
- 完成设置
若勾选完毕则可以看到 工具(T)-> Tools -> Export as URDF :
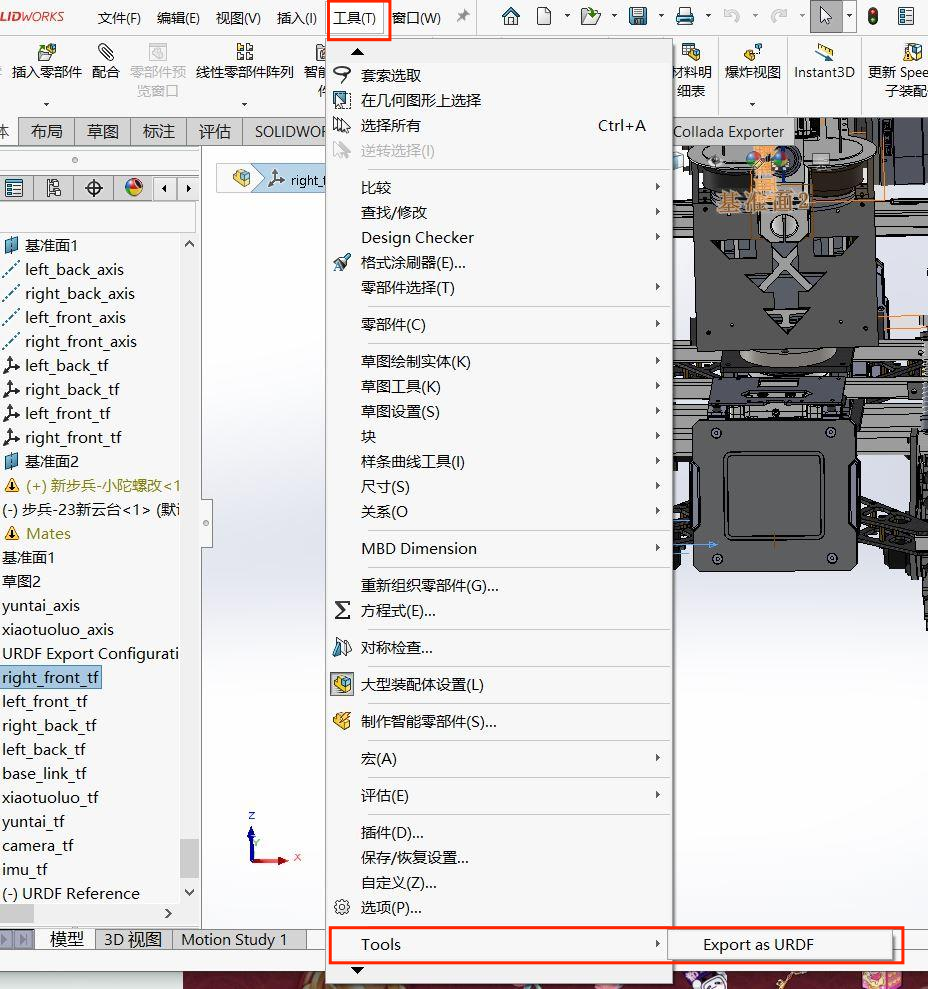
——若出现这个选项则代表插件的安装以及成功,可以进行下一步——
模型坐标系的建立
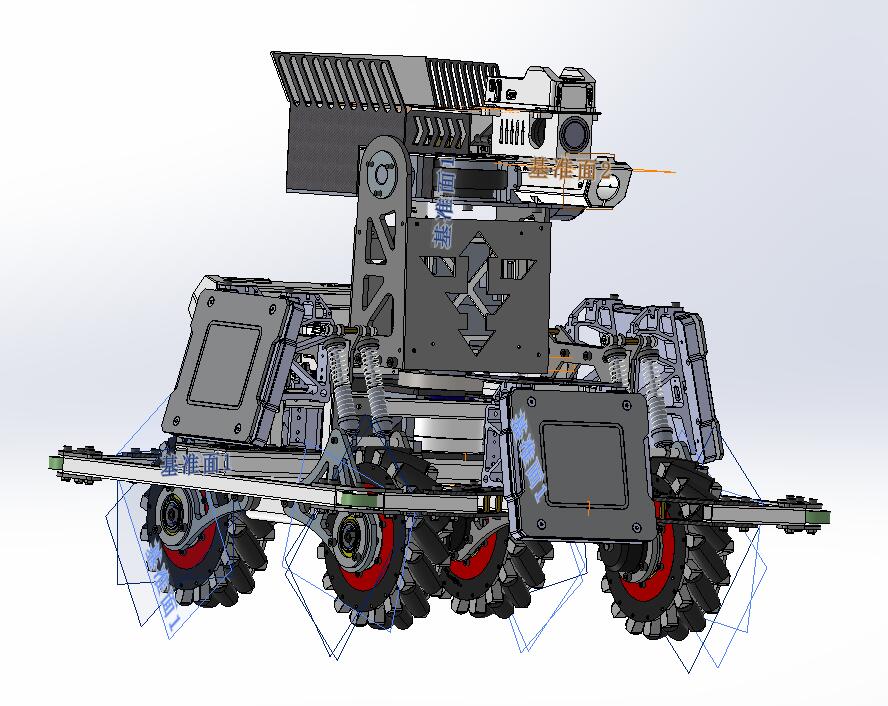
以FJUT苍侠战队23赛季步兵机器人进行URDF的模型生成
整体机器人如下
- 确定好需要进行控制的部位
对机器人的图像进行分析,可以将机器人的部分结构分为。
| 结构 | 数量 |
|---|---|
| 车轮 | 4 |
| 云台 | 1 |
| 底盘 | 1 |
| 小陀螺结构 | 1 |
| 陀螺仪(imu) | 1 |
| 工业相机 | 1 |
| ----- | ∞ |
| 确定完所需要建立的坐标系的部位,就可以开始设定坐标系了 |
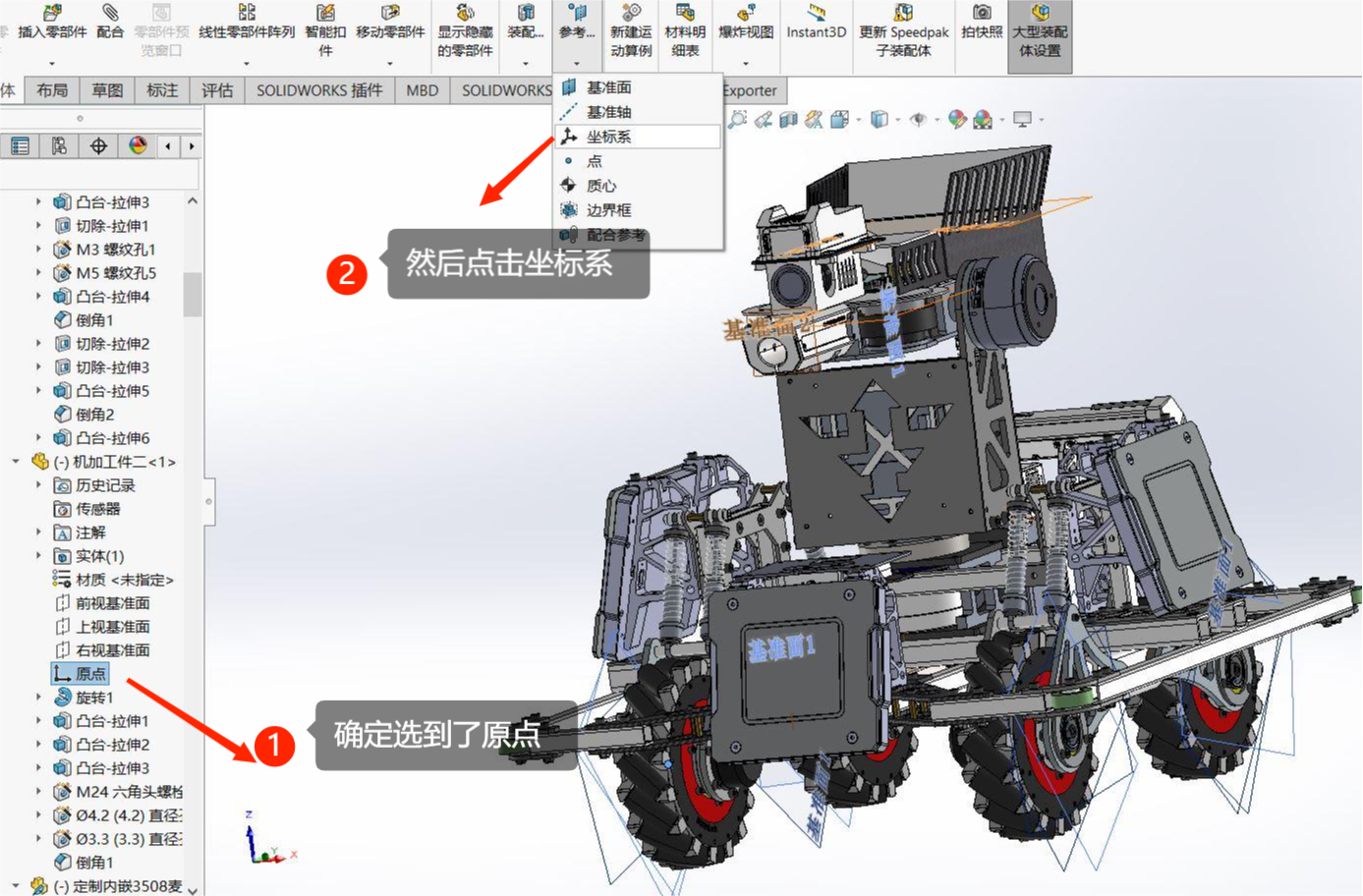
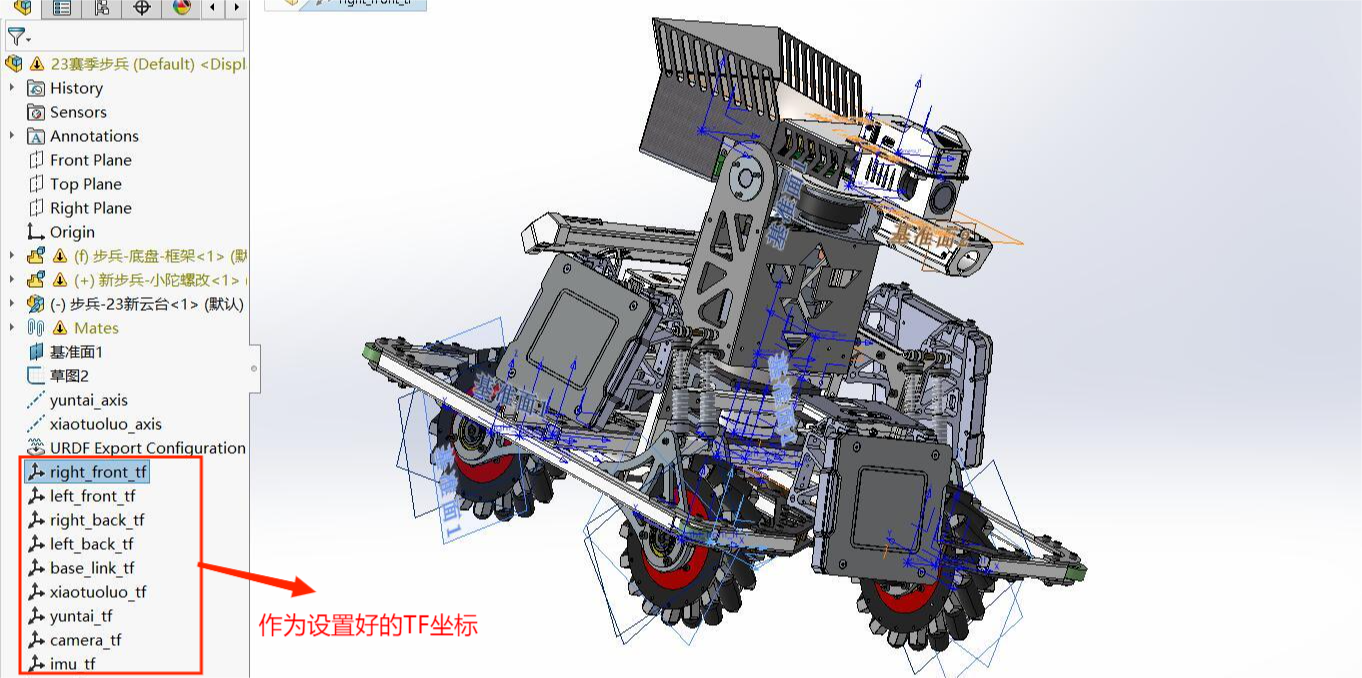
- 建立坐标系
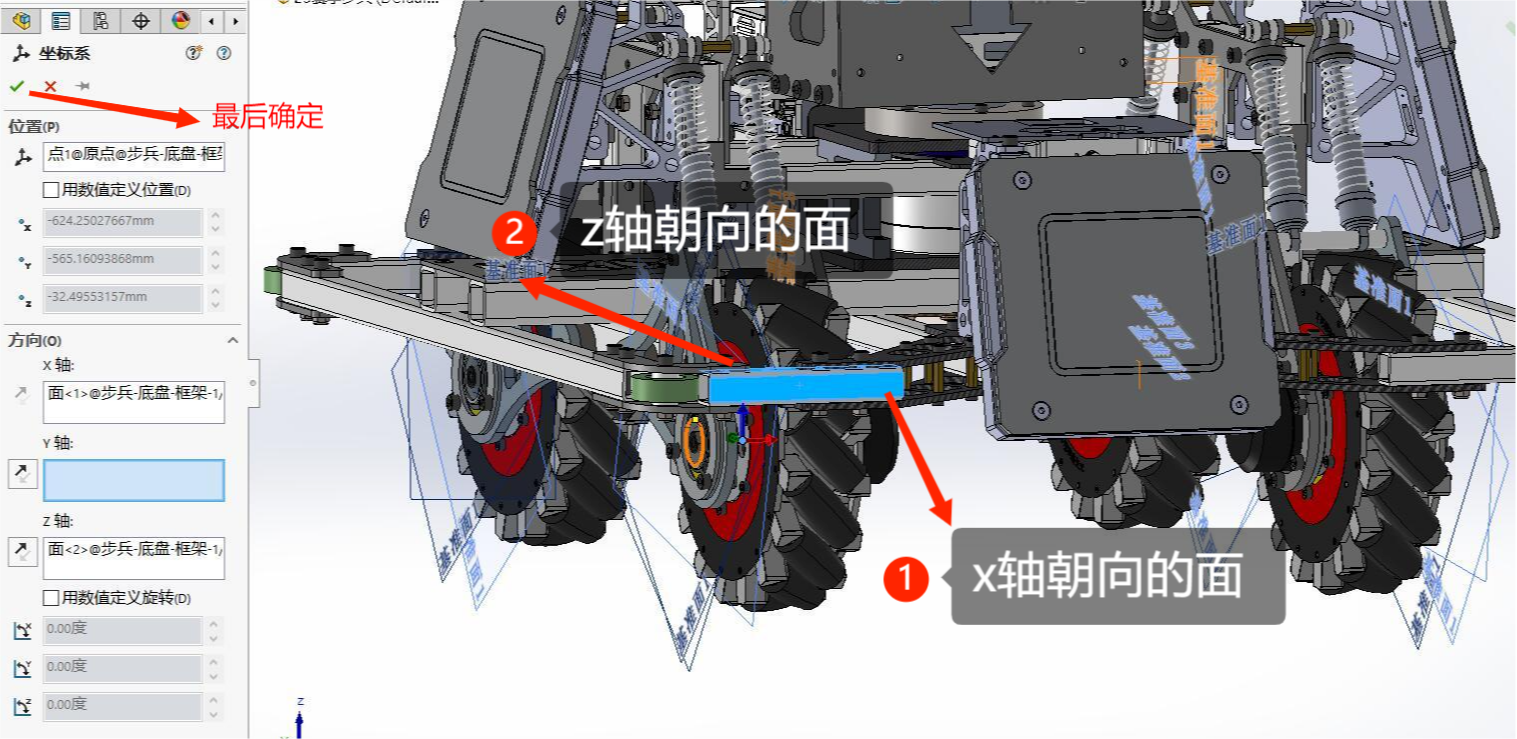
以车轮作为示例,各个部分的坐标轴都设置在该部分的物体中心
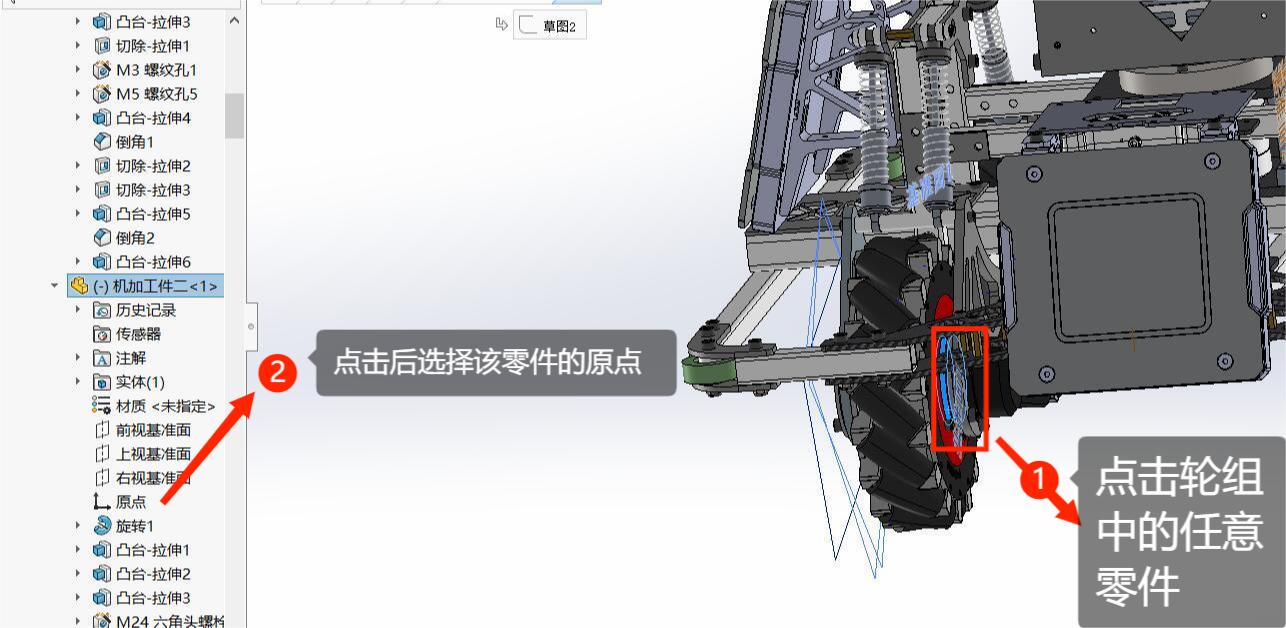
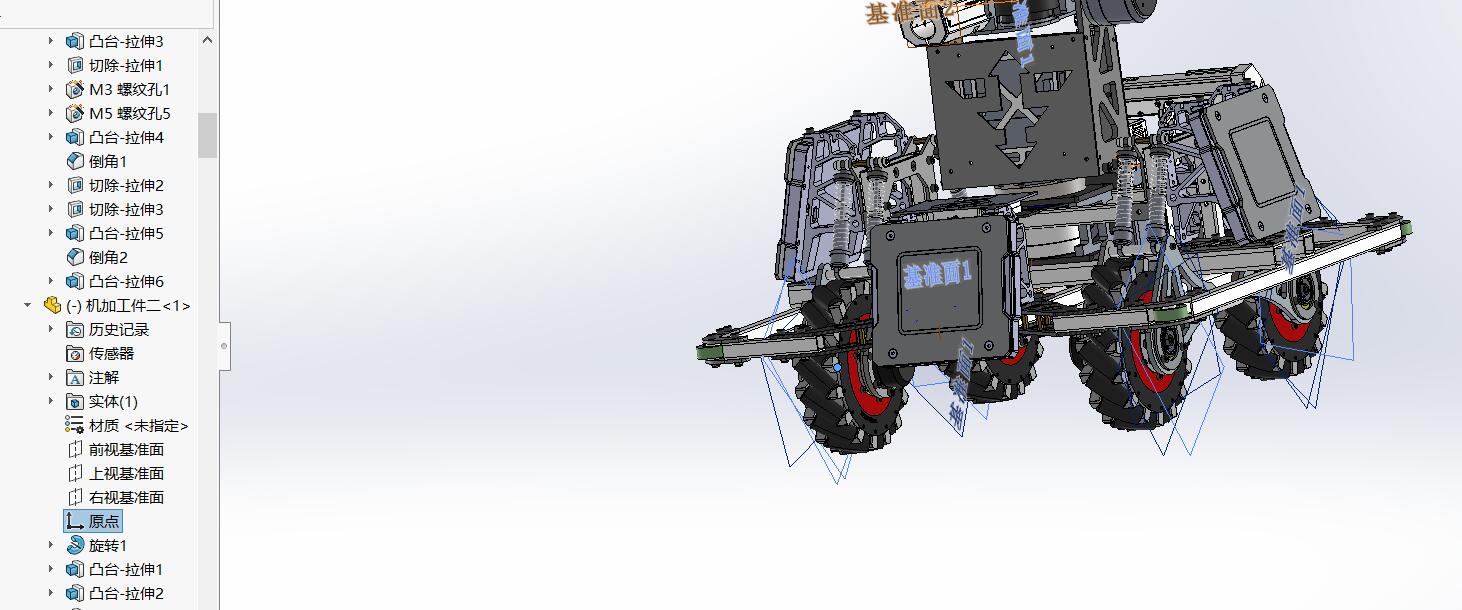
这时可以看到原点出现在轮组中心,确定坐标轴原点位置正确
 P.S.:命名最好如图格式,方便在URDF导出的时候进行选取
P.S.:命名最好如图格式,方便在URDF导出的时候进行选取
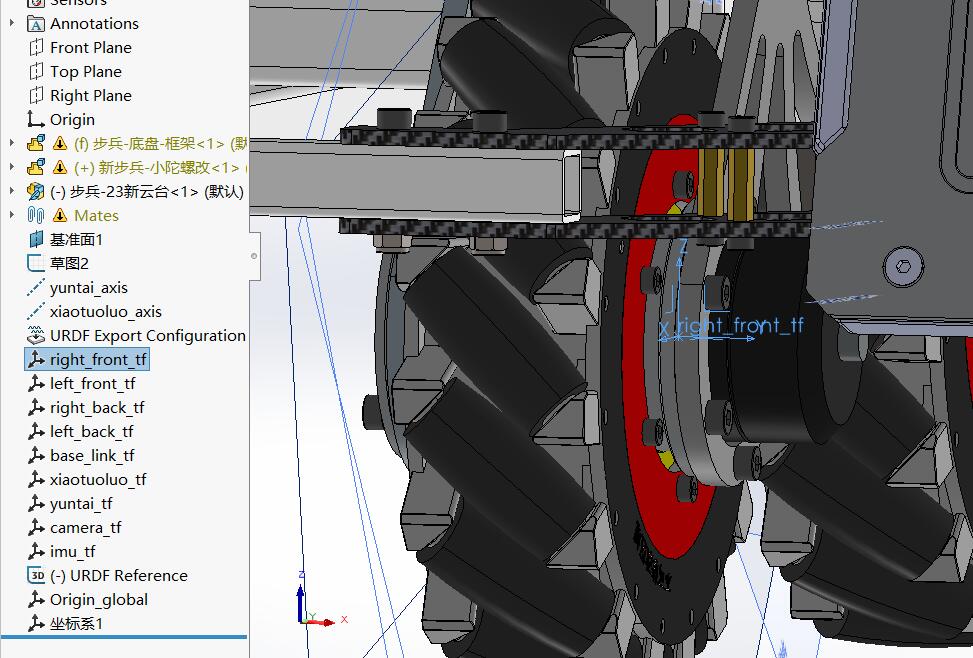
- 最终效果
使用相同的方法,将上述需要设定的部位的坐标轴都设定好
并且确认每个坐标轴的位置以及方向
最终效果如下
模型旋转轴的设定
- 确定部位的旋转方向
确定电机的数量以及朝向,就可以确定出旋转轴的方向以及旋转轴的数量
| 结构 | 数量 |
|---|---|
| 车轮 | 4 |
| 云台 | 1 |
| 底盘 | 1 |
| ----- | ∞ |
| 通过机械结构图,可以确定出六个旋转轴的位置 |
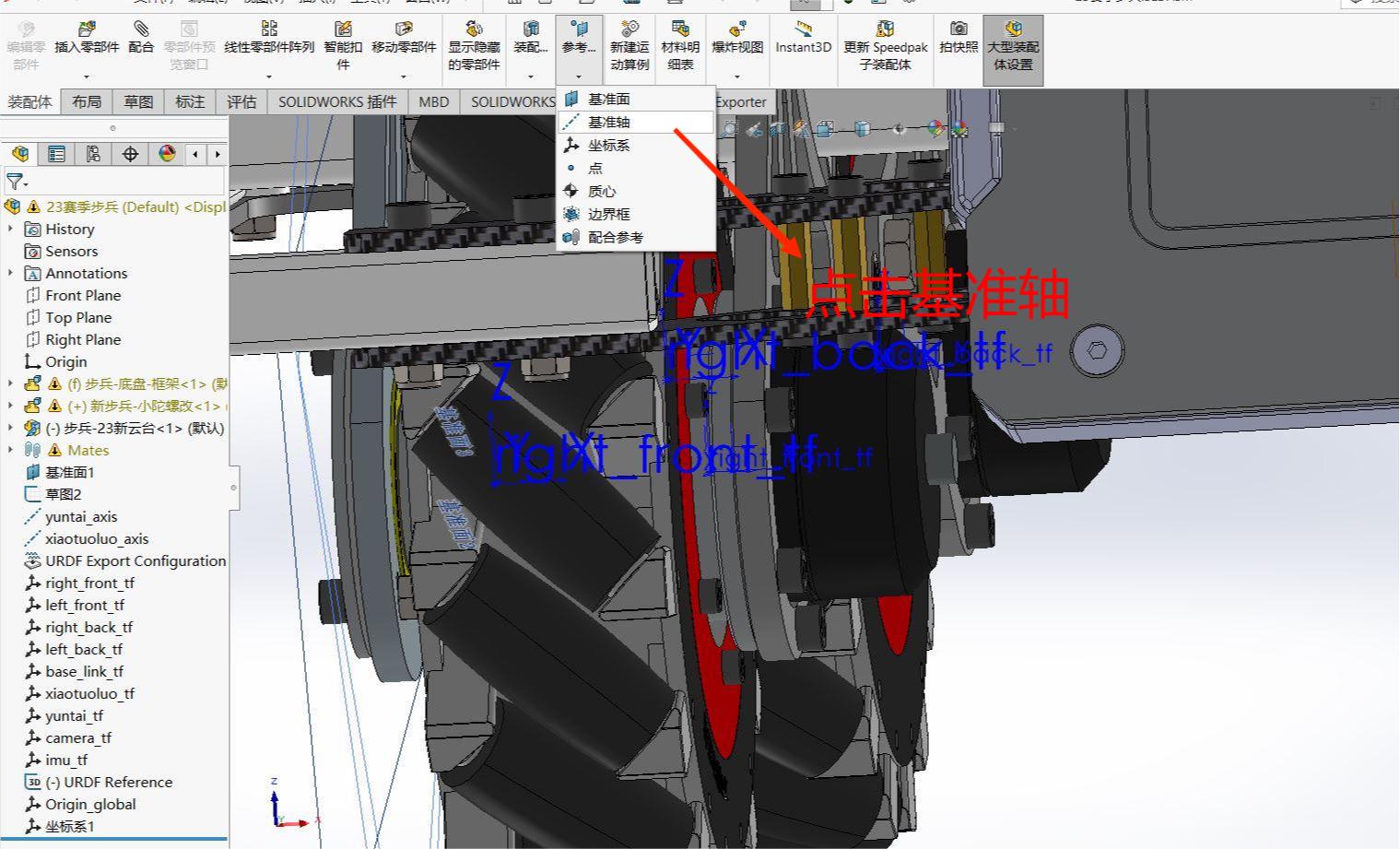
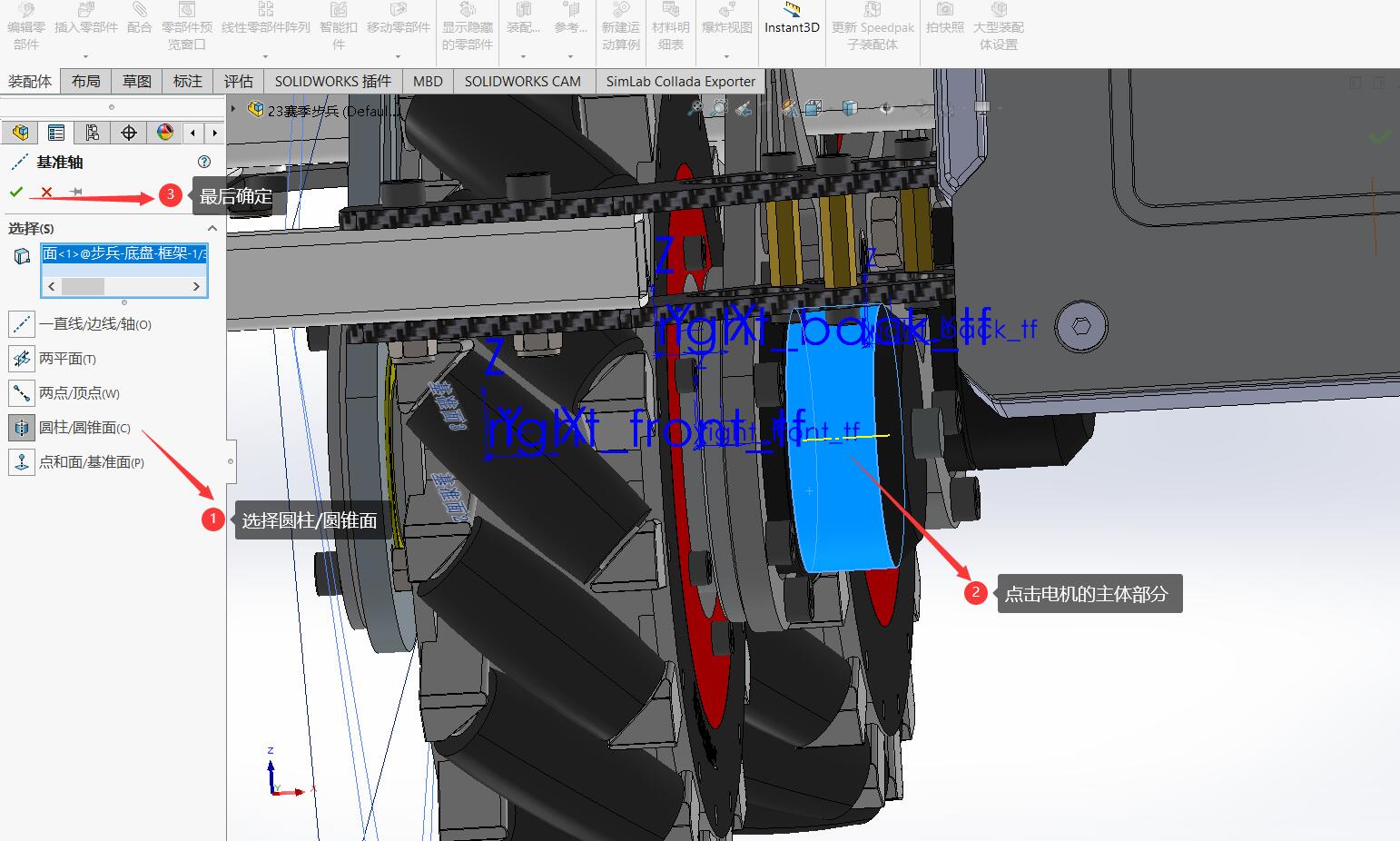
- 设定旋转轴
相较于设定坐标轴,这一步会更加简单,通过SolidWorks中旋转轴的设定,即可完成
- 最终效果
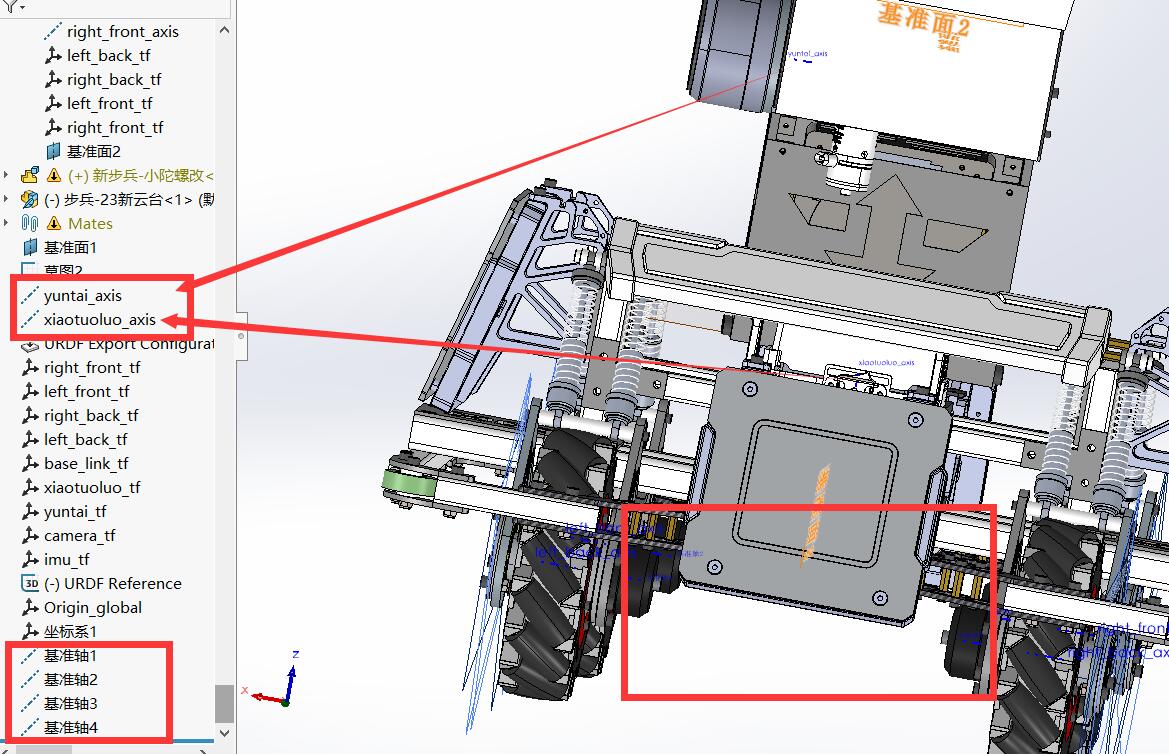 P.S.:命名最好统一格式,方便在URDF导出的时候进行选取
P.S.:命名最好统一格式,方便在URDF导出的时候进行选取
URDF插件的使用
- 检��查各个位置的坐标系以及旋转轴是否正确
确定9个坐标轴的方向以及位置是否正确
确定6个基准轴是否设定正确
确认完毕后可以进行URDF的导出,点击 Export as URDF
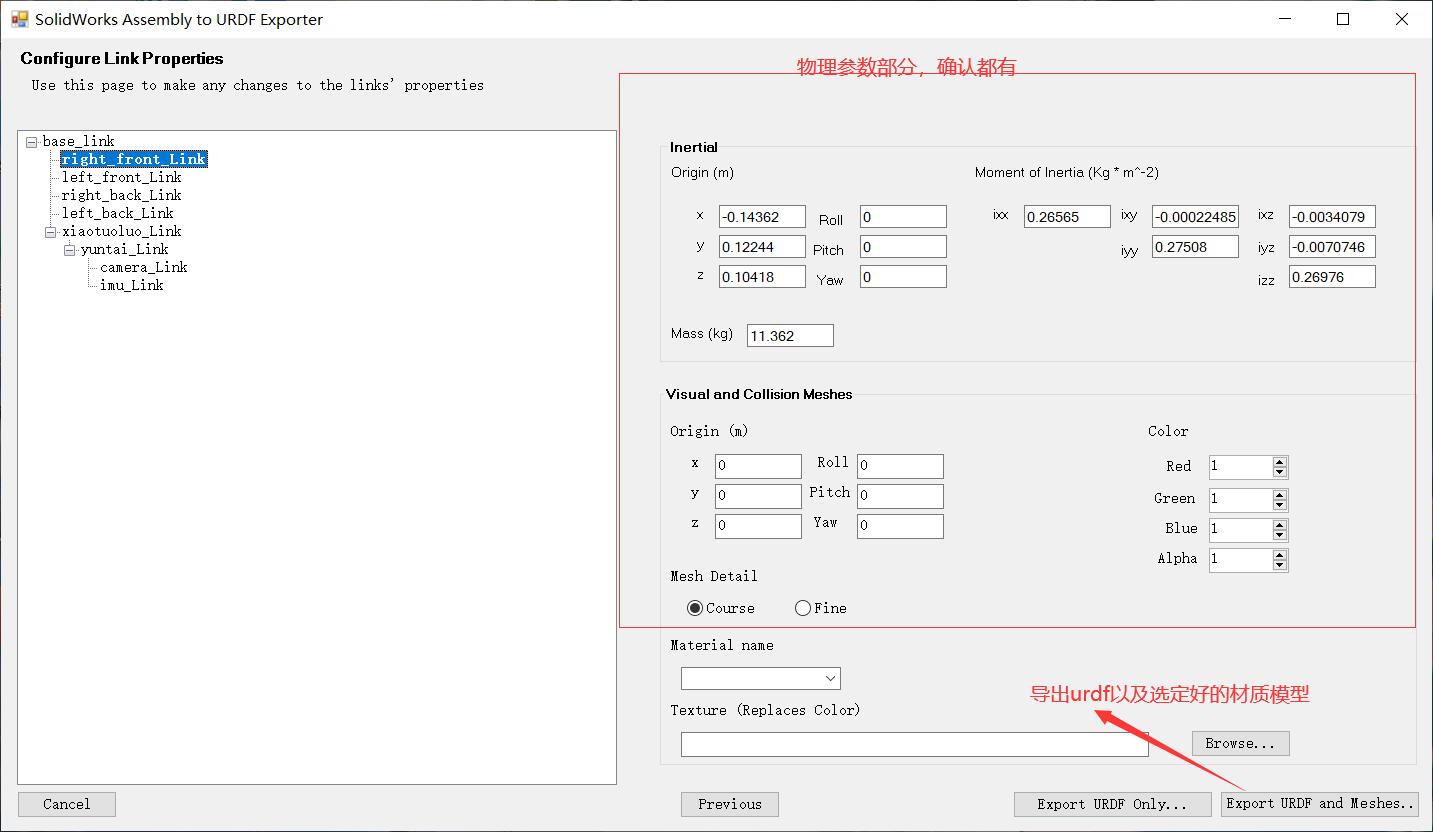
URDF Exoprter
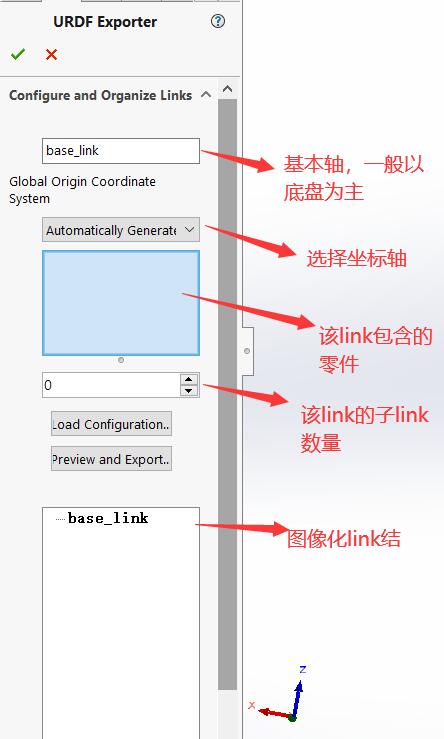
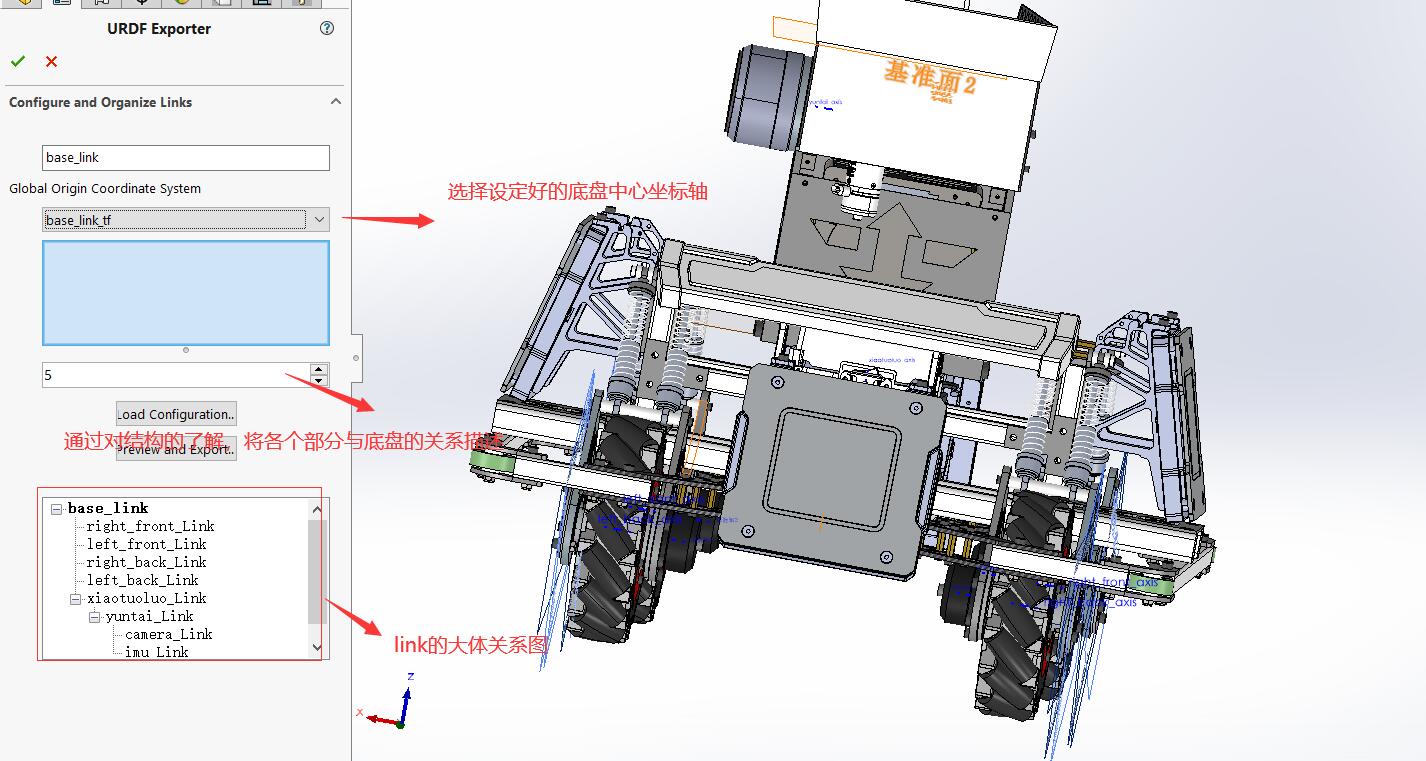
- 确定好每一个 Link 之间的关系
确定好整个模型的结构,以底盘为base_link
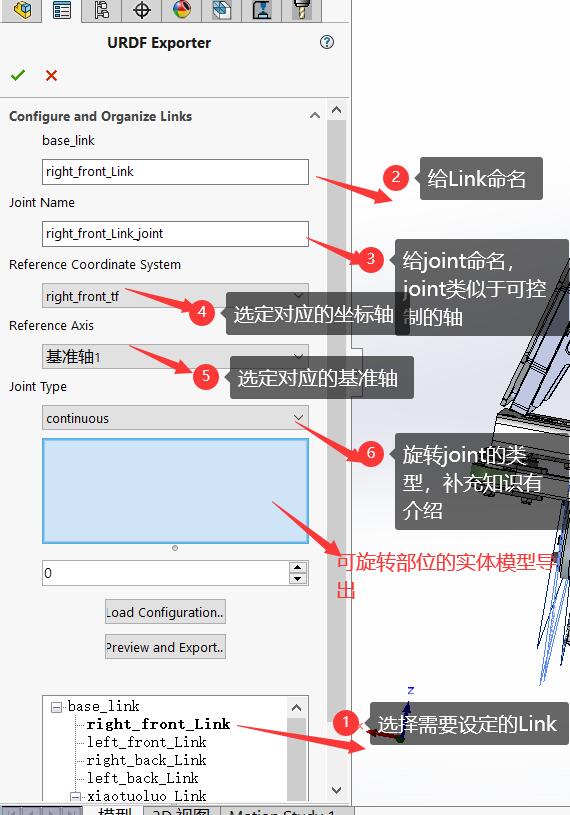
 3. 设定每一个link的坐标轴,以及基准轴
3. 设定每一个link的坐标轴,以及基准轴
以车轮为例子
用相同的办法将所有的 Link 设定完成后即可导出。
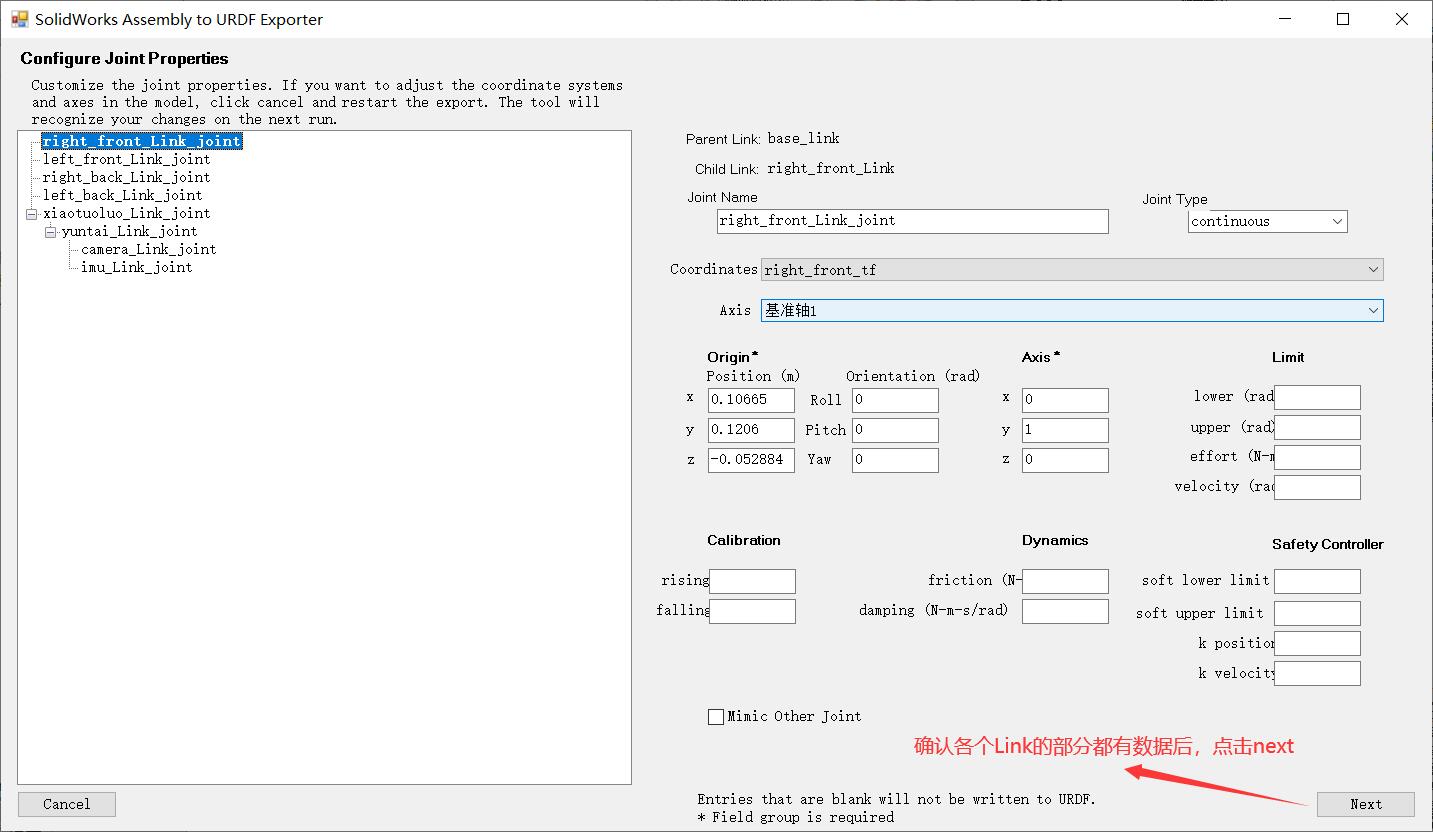
- 导出前的检查
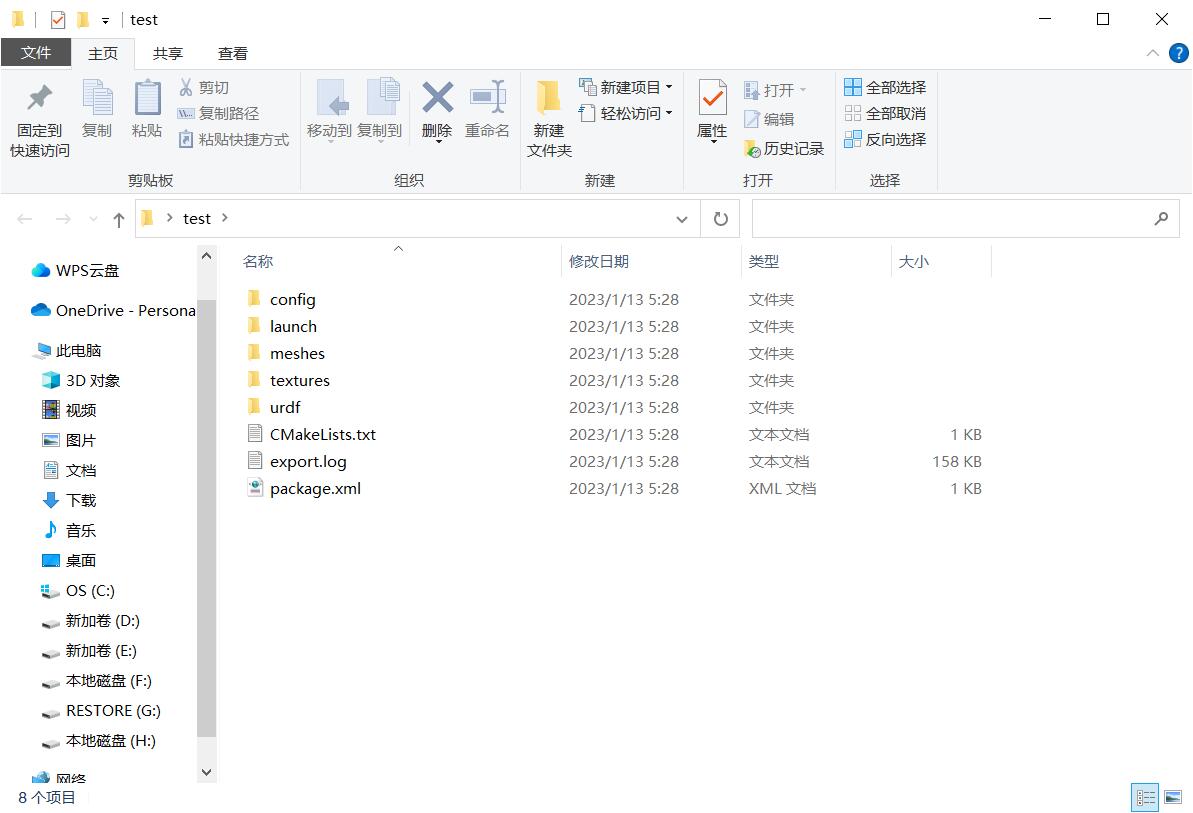
- 最终生成文件夹 (其实是 ROS 的 package)
 知识补充(joint type)
知识补充(joint type)
| 类�型 | 解释 |
|---|---|
| continuous | 一个没有角度限制的,绕着一根轴转动的关节类型 |
| revolute | 一个有角度限制的,绕着一根轴转动的关节类型 |
| prismatic | 一个沿着一根轴平移的关节,有限位 |
| fixed | 固定关节 |
| floating | 一个允许六自由度的浮动关节 |
| planar | 该关节允许在垂直于轴的一个平面内进行运动 |
通过ros打开模型
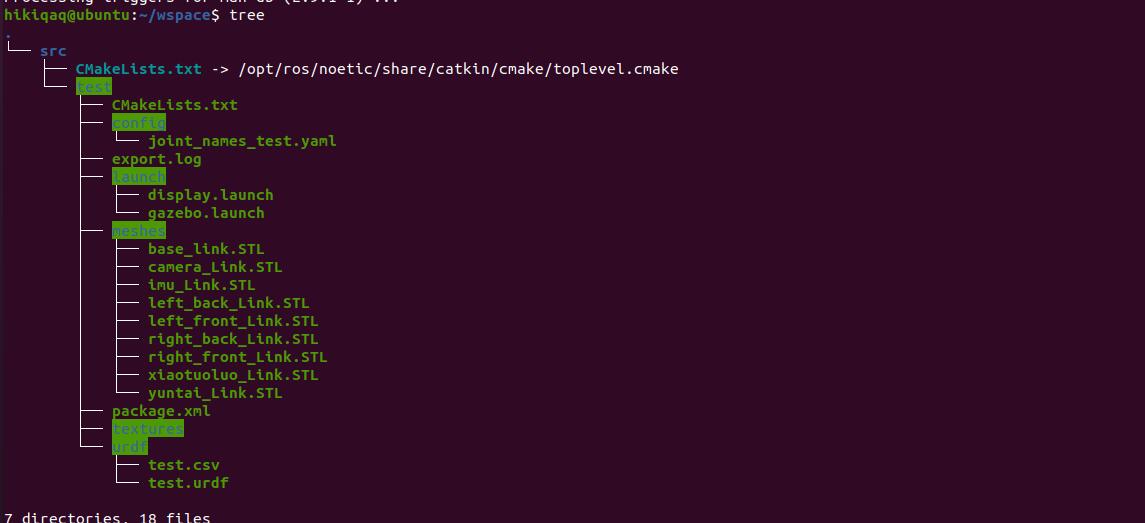
- 将导出的文件夹复制到工作空间中
最终工作空间的文件夹结构如下
- rviz,gazebo打开模型
进入工作空间的路径下,输入命令
catkin_make
source devel/setup.bash or source devel/setup.zsh
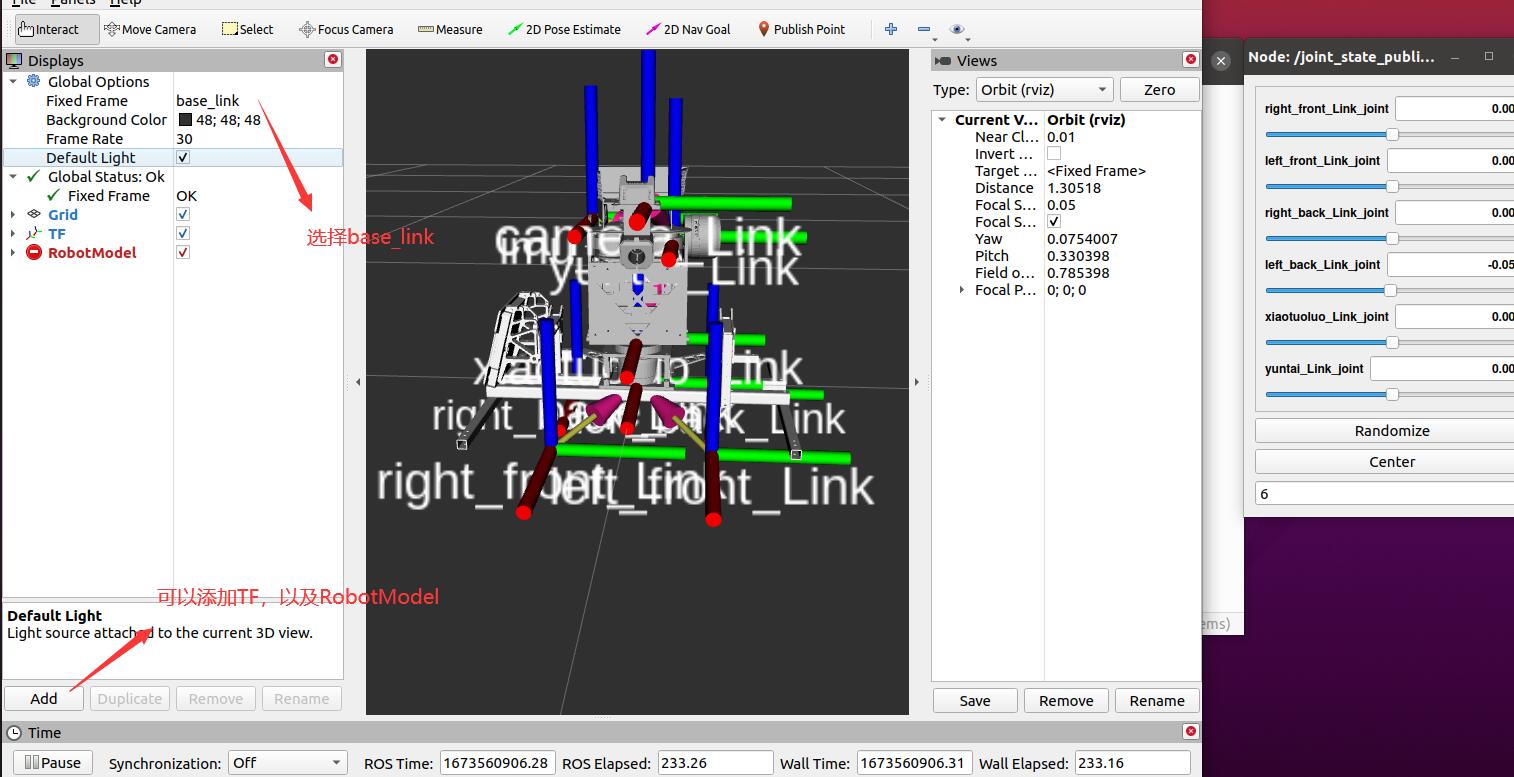
如果想要打开rviz查看URDF的效果
roslaunch (package-name) display.launch
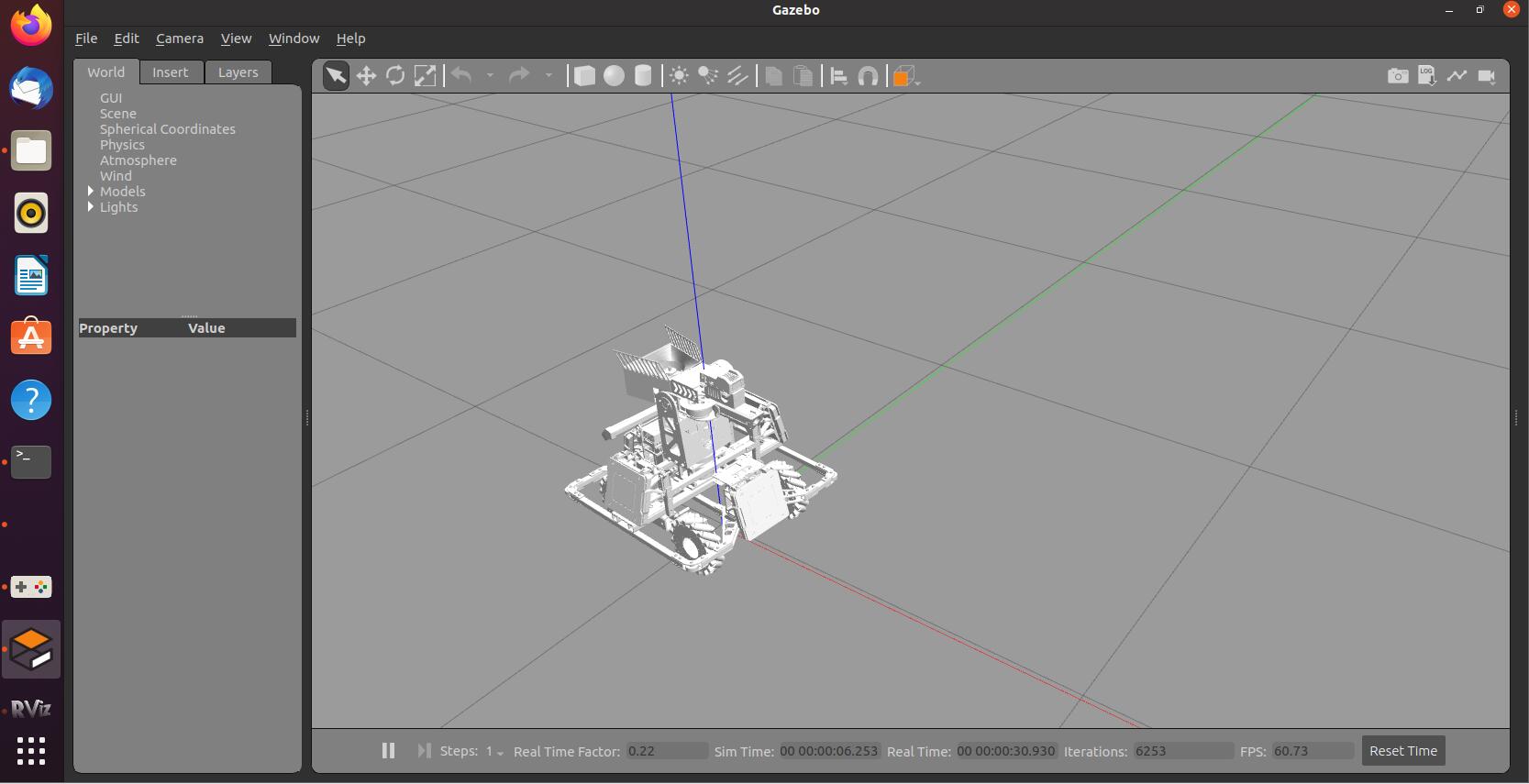
如果想要用gazebo查看URDF的效果
roslaunch (package-name) gazebo.launch
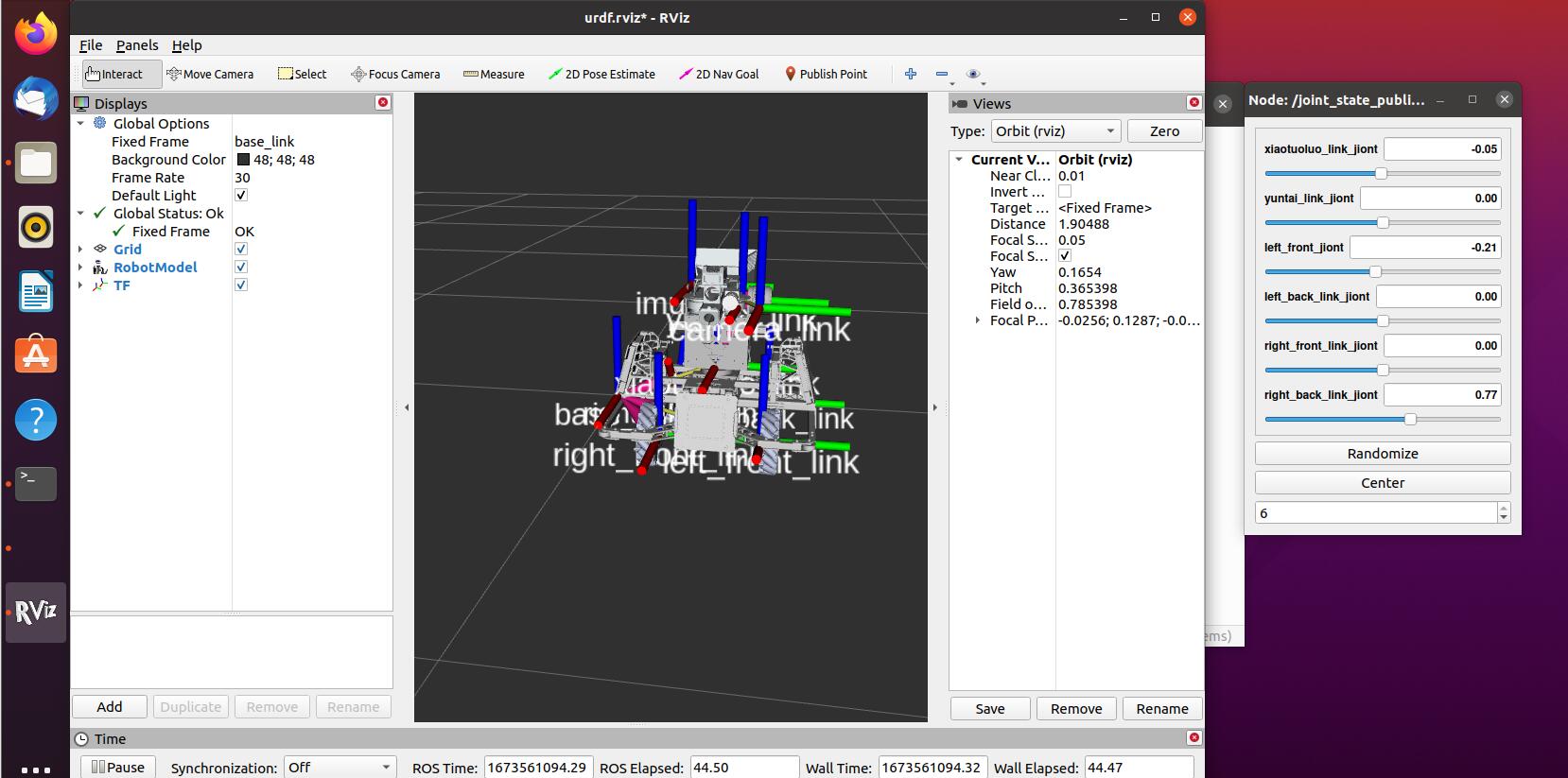
- 最终效果,实现了URDF模型的建立
- rviz画面
- 优化后的模型演示
在制作教程之前所做的模型
将轮组以及车的各个部分都细致选中的版本
- rviz演示
- gazebo演示
结束
后续必然会将视频一起更新上的(QWQ)