设置ROS2开机自启
Systemd 概述1
systemd 是一个专用于 Linux 操作系统的系统与服务管理器。 当作为启动进程(PID=1)运行时, 它将作为初始化系统运行, 也就是启动并维护各种用户空间的服务。
当作为系统实例运行时, systemd 将会按照 system.conf 配置文件 以及 system.conf.d 配置目录中的指令工作; 当作为用户实例运行时,systemd 将会按照 user.conf 配置文件 以及 user.conf.d 配置目录中的指令工作。
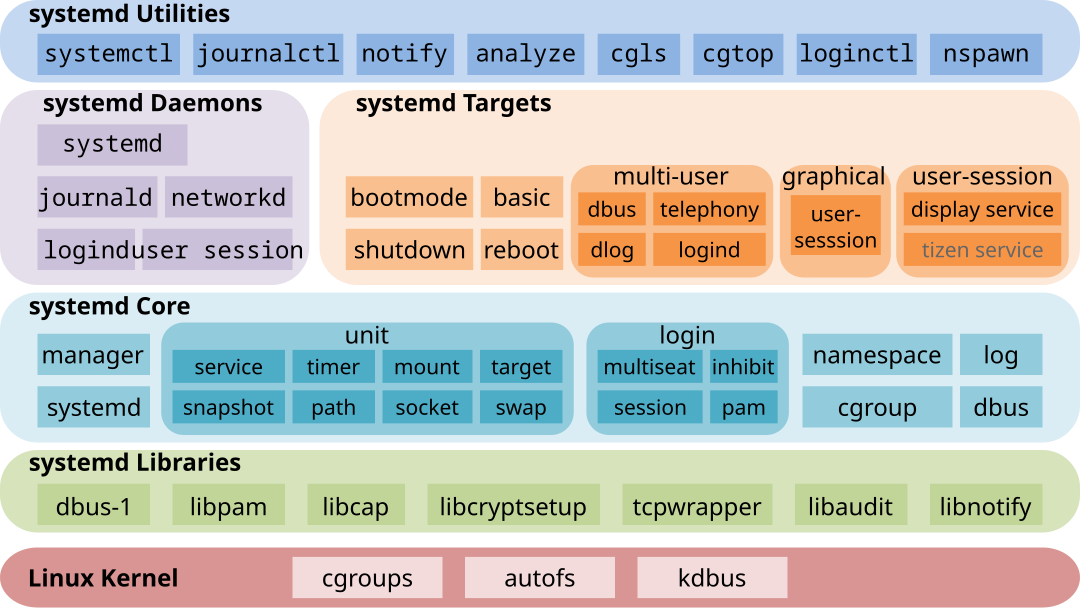
Systemd架构图:
自启动模板
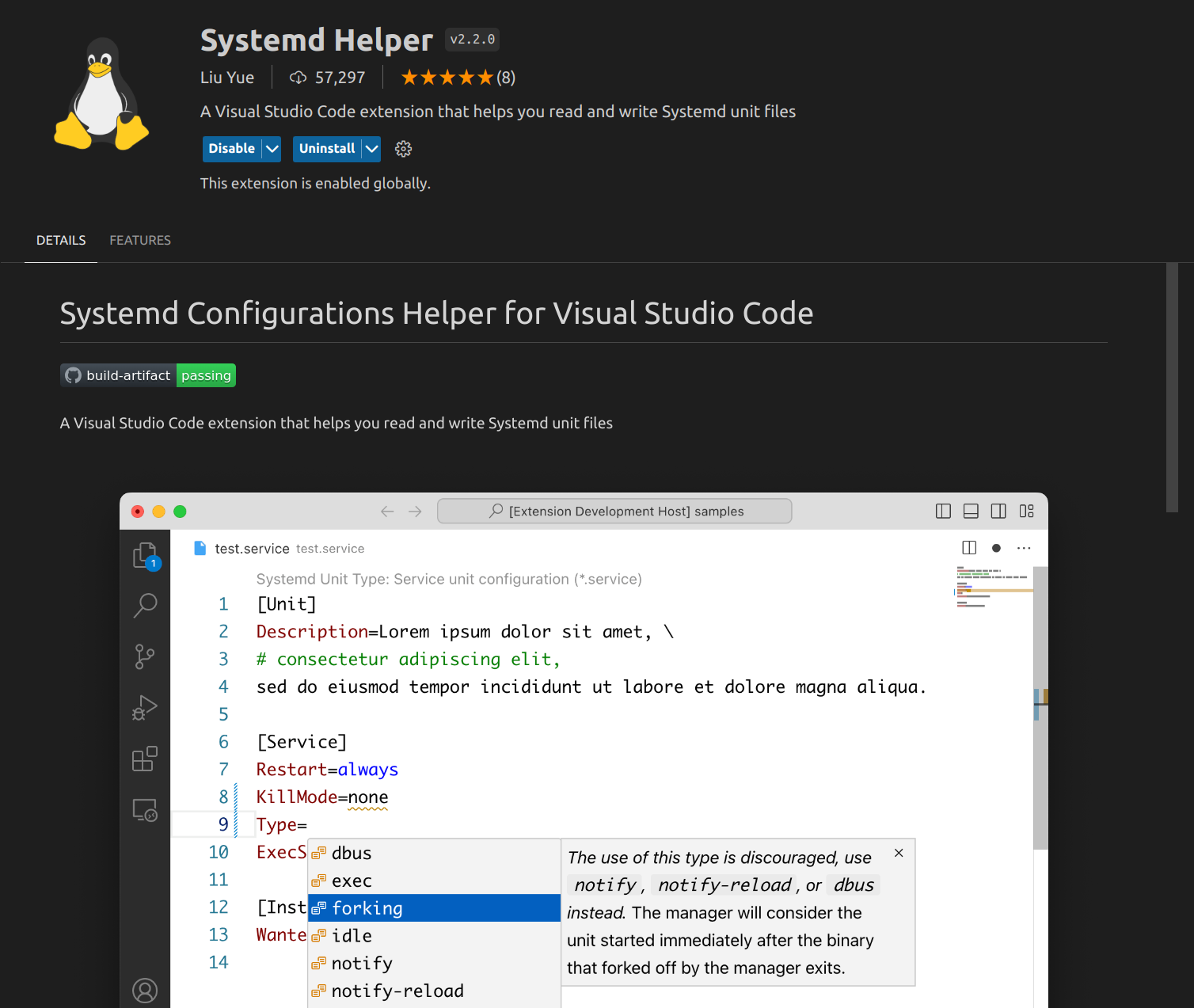
在vscode中编辑时推荐安装 Systemd Helper 扩展
 更多通用模板:↻
更多通用模板:↻
[Unit]
Description=ROS2 Launch 服务描述
Before= ...设置服务启动先后顺序
After= ...设置服务启动先后顺序
[Service]
Environment="ROS_HOME=<你的工作空间路径>"
Type=simple(最简单的类型)
User=进程在执行时使用的用户
ExecStart=开启服务后需要执行的命令
ExecStop=关闭服务后需要执行的命令,例如 /bin/kill -s INT $MAINPID
KillSignal=设置杀死进程时使用什么信号
RestartSec=�服务重启间隔时间
Restart=服务是否重启
[Install]
WantedBy=multi-user.target
注:service需要在/etc/systemd/system/目录下创建(当使用systemctl enable ...的时候systemd会在/etc/systemd/system中建立名为xxx.service的软链接,链接到这个目录的xxx.service,这样才会开机自启这个服务)
``
脚本写法举例如下,可能还需要设置一些环境变量,见↻
#! /bin/bash
source /opt/ros/humble/setup.bash
source <你的工作空间中/install/setup.bash的路径>
然后下面就写启动各个节点需要的命令
如果有些命令需要sudo,可以通过管道的方式预先留好密码并输入:echo "密码" | sudo -S <命令>。
例如 echo "a" | sudo -S chmod 777 /dev/ttyUSB0
示例2
某机器人需要运行多个ros2程序,这些程序有些是拿.sh启动,有些是拿.py启�动,启动时还会调用.launch来启动,关闭时使用SIGTERM又很难关掉,并且因为频繁修改调试,需要快捷地安装进系统,这些文件内容如下:
- others.service
[Unit]
Description=others
Before=navigation.service deep.service
[Service]
Environment="ROS_HOME=/home/sentry/Sentry2023"
Type=simple
User=sentry
ExecStart=/usr/bin/python3 /home/sentry/Sentry2023/start_others.py
ExecStop=/bin/kill -s INT $MAINPID
ExecReload=/bin/kill -s INT $MAINPID && /usr/bin/python3 /home/sentry/Sentry2023/start_others.py
KillSignal = SIGKILL
RestartSec=2
Restart=always
StartLimitInterval=0
[Install]
WantedBy=multi-user.target
- deep.service
[Unit]
Description=deep detector
After=others.service
[Service]
Environment="ROS_HOME=/home/sentry/Sentry2023"
Type=simple
User=sentry
ExecStart=/home/sentry/Sentry2023/start_deep.sh
ExecStop=/bin/kill -s INT $MAINPID
ExecReload=/bin/kill -s INT $MAINPID && /home/sentry/Sentry2023/start_deep.sh
KillSignal=SIGKILL
RestartSec=2
Restart=always
[Install]
WantedBy=multi-user.target
- navigation.service
[Unit]
Description=navigation
After=others.service
[Service]
Environment="ROS_HOME=/home/sentry/Sentry2023"
Type=simple
User=sentry
ExecStart=/home/sentry/Sentry2023/start_navigation.sh
ExecStop=/bin/kill -s INT $MAINPID
ExecReload=/bin/kill -s INT $MAINPID && /home/sentry/Sentry2023/start_navigation.sh
KillSignal = SIGKILL
RestartSec=2
Restart=always
[Install]
WantedBy=multi-user.target
- record_topic.service
[Unit]
Description=record topic
After=navigation.service
[Service]
Environment="ROS_HOME=/home/dino/Sentry2023"
Type=simple
User=dino
ExecStart=/home/dino/Sentry2023/start_record_topic.sh
KillSignal=SIGINT
RestartSec=2
Restart=always
[Install]
WantedBy=multi-user.target
- start_others.py
import os
import subprocess as sp
from time import sleep
source_cmd = ". install/setup.sh"
start_control_cmd = "ros2 launch control control.launch.py"
start_scan_cmd = "ros2 run scan scan"
start_behaviortree_cmd = "ros2 run behavior_tree behaviortree"
andand=" && "
current_path = "/home/sentry/Sentry2023"
# 链接U转can
ip_link_cmd = "echo 'a' | sudo -S ip link set can0 down && sudo ip link set can0 type can bitrate 1000000 && sudo ip link set can0 up"
result = sp.Popen(ip_link_cmd, shell=True, stdout=sp.PIPE, stderr=sp.PIPE)
out, err= result.communicate()
for line in err.splitlines():
if("Cannot find device" in str(line)):
print("无法打开U转can, error=\n " + str(line)[2:-1])
exit()
# 打开节点
control = sp.Popen(args=source_cmd + andand + start_control_cmd, cwd=current_path, shell=True)
scan = sp.Popen(args=source_cmd + andand + start_scan_cmd, cwd=current_path, shell=True)
behaviortree = sp.Popen(args=source_cmd + andand + start_behaviortree_cmd, cwd=current_path, shell=True)
while True:
sleep(10)
- start_deep.sh
#!/bin/zsh
cd /home/sentry/Sentry2023
. install/setup.zsh
ros2 launch deepdetector deepdetector.launch.py
- start_navigation.sh
#!/bin/zsh
cd /home/sentry/Sentry2023
. install/setup.zsh
ros2 launch navigation start_navigation.launch.py
#if [ -c /dev/ttyUSB0 ];then
# echo 'a' | sudo -S chmod 777 /dev/ttyUSB0
# . install/setup.zsh
# ros2 launch navigation start_navigation.launch.py
#else
# while true
# do
# echo "no device /dev/ttyUSB0"
# sleep 1s
# done
#fi
- start_record.sh
#!/bin/zsh
cd /home/sentry/Sentry2023
. install/setup.zsh
current_time=`date +'%F_%H:%M:%S'`
ros2 bag record -o ${current_time} /Game /scan /ShootSome /SetGimbalAngle /SetGimbal_YawSpeed_PitchAngle /GetGimbalSpeed /BT_top /BT_navigation /ScanCtrlInfo /BT_shooter /Armors /tf /local_costmap/costmap /path /map
- installservice.sh
#!/bin/zsh
if [ ! -d /usr/lib/systemd/system ];then
mkdir /usr/lib/systemd/system
fi
echo 'a' | sudo -S cp src/bring_up/scripts/*.service /usr/lib/systemd/system
echo 'a' | sudo -S systemctl daemon-reload
echo 'a' | sudo -S systemctl disable navigation.service
echo 'a' | sudo -S systemctl disable others.service
echo 'a' | sudo -S systemctl disable deep.service
echo 'a' | sudo -S systemctl disable record_topic.service
echo 'a' | sudo -S systemctl enable navigation.service
echo 'a' | sudo -S systemctl enable others.service
echo 'a' | sudo -S systemctl enable deep.service
# echo 'a' | sudo -S systemctl enable record_topic.service